We are now ready to present an example of the second class of learning control methods we consider in this book: off-policy methods. Recall that the distinguishing feature of on-policy methods is that they estimate the value of a policy while using it for control. In off-policy methods these two functions are separated. The policy used to generate behavior, called the behavior policy, may in fact be unrelated to the policy that is evaluated and improved, called the estimation policy. An advantage of this separation is that the estimation policy may be deterministic (e.g., greedy), while the behavior policy can continue to sample all possible actions.
Off-policy Monte Carlo control methods use the technique presented in the preceding section for estimating the value function for one policy while following another. They follow the behavior policy while learning about and improving the estimation policy. This technique requires that the behavior policy have a nonzero probability of selecting all actions that might be selected by the estimation policy. To explore all possibilities, we require that the behavior policy be soft.
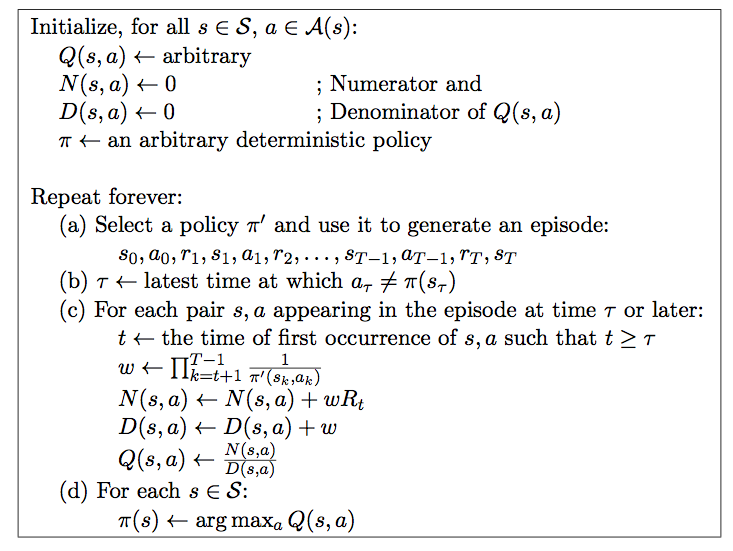
Figure
5.7 shows an off-policy Monte Carlo method, based on
GPI, for computing ![]() .
The behavior policy
.
The behavior policy ![]() is maintained as an
arbitrary soft policy. The estimation policy
is maintained as an
arbitrary soft policy. The estimation policy ![]() is the greedy policy
with respect to
is the greedy policy
with respect to ![]() , an estimate of
, an estimate of
![]() . The
behavior policy chosen in (a) can be anything, but in order to assure
convergence of
. The
behavior policy chosen in (a) can be anything, but in order to assure
convergence of ![]() to the optimal policy, an infinite number of returns
suitable for use in (c) must be obtained for each pair of state and
action. This can be assured by careful choice of the behavior policy. For
example, any
to the optimal policy, an infinite number of returns
suitable for use in (c) must be obtained for each pair of state and
action. This can be assured by careful choice of the behavior policy. For
example, any ![]() -soft behavior policy will suffice.
-soft behavior policy will suffice.
A potential problem is that this method learns only from the tails of episodes, after the last nongreedy action. If nongreedy actions are frequent, then learning will be slow, particularly for states appearing in the early portions of long episodes. Potentially, this could greatly slow learning. There has been insufficient experience with off-policy Monte Carlo methods to assess how serious this problem is.
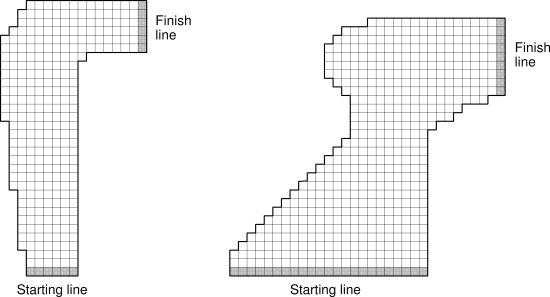
Exercise 5.4: Racetrack (programming) Consider driving a race car around a turn like those shown in Figure 5.8. You want to go as fast as possible, but not so fast as to run off the track. In our simplified racetrack, the car is at one of a discrete set of grid positions, the cells in the diagram. The velocity is also discrete, a number of grid cells moved horizontally and vertically per time step. The actions are increments to the velocity components. Each may be changed by